東北学院大学大学院 工学研究科では、高度な研究を行うために研究者・エンジニアとしての能力を実践的に養います。


1996年東北大学大学院工学研究科機械工学専攻博士課程修了。
秋田県立大学機械知能システム学科助教授などを経て、2008年より東北学院大学工学部機械知能工学科教授。
人は歩行方向を変える時、まずその方向に頭を向け、次にその運動に追従するよう体幹の向きを変えると言われている。
「この頭部運動が、歩行にどう影響するか解析し、その知見を基に、頭部姿勢制御による視覚障がい者用の歩行誘導システムを開発しています」。
障害物を検出するセンサを搭載した白杖システムは、数多く提案されている。それらは、障害物の方向や距離の情報を、音や振動の種類で伝えるというものだ。
「この伝達方法では、とっさに理解しづらく、即座に適切な回避行動を行うことが困難でした。そこで、頭部姿勢の制御によって回避すべき方向に身体の向きを変えてあげることができれば、使用者の負担を軽減できると考えたのです」。
試作した頭部回旋装置を装着して歩行実験を行い、歩行軌跡の変化を解析するとともに、深度カメラを用いて歩行領域の障害物検出アルゴリズムを構築している。
「最終的には両者を統合し、ウエアラブルな歩行誘導システムとして実用化を目指します。人の解析から新しい知見を得られることに、研究の魅力を感じています」。
梶川教授はほかにも、人の能力を活かして増大させる支援機器を考案し、実現するためのさまざまな研究に取り組んでいる。四肢麻痺患者に向けた、舌操作型ジョイスティックの開発もその1つだ。
多彩な動きが可能で、触覚にも優れた器官である舌の能力を解析し、その能力を活かせる操作器の実現を目指す。
「ジョイスティックの操作感を制御することで、例えば電動車椅子に搭載したセンサが、使用者の見落とした段差などを検出した場合、その方向へ操作に対して舌を押し返す反応で危険を知らせるなど、行動を見守るような機能を持たせたいと考えています」。
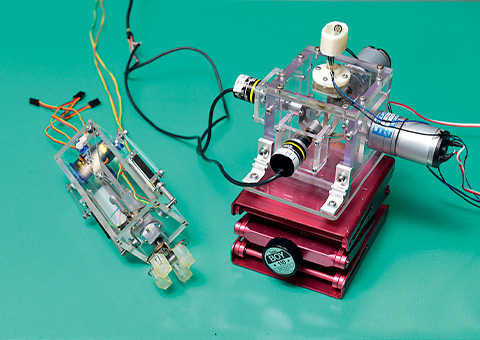
本研究では、舌の可動域や力の計測実験、触れた物の硬さの違いを識別する能力の計測実験を行い、その結果を基に、操作時の硬さを調節できる機構を搭載したジョイスティックを製作した。それを用いて移動ロボットを遠隔操作し、ロボット搭載のセンサで検出した情報を、スティックの硬さで通知する操作性実験を進めている。
「新しいアイデアを考えるのは、とても楽しいこと。大学院での研究生活を通して、この楽しさを存分に味わってください」。